Constructor Robotics participated as partner, at the time still under the previous name of Jacobs University of our institution, in the EU H2020 project Effective Dexterous ROV Operations in Presence of Communications Latencies (DexROV).
Overview
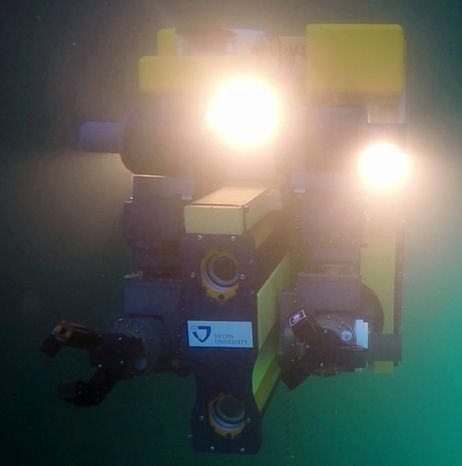
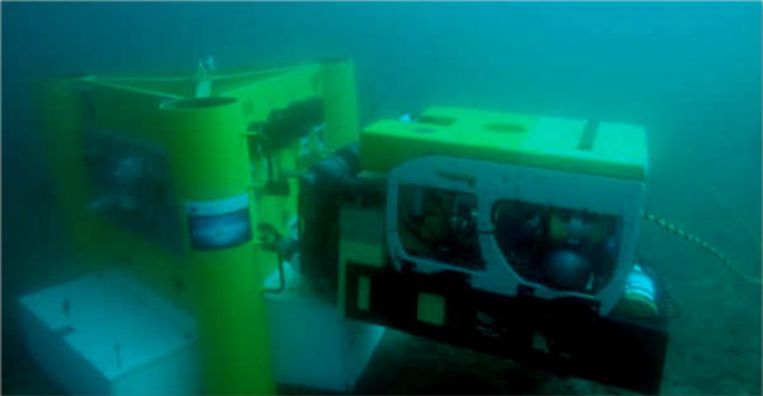
The DexROV project reduces the amount of robot operators required offshore – hence reducing cost and inconveniences – by facilitating operations from an onshore control center and reducing the gap between low-level tele-operation and full autonomy, i.e., the gap between Remotely Operated Vehicles (ROV) and Autonomous Underwater Vehicles (AUV). The basic idea is that the user interacts with a real time simulation environment, and a cognitive engine analyzes the user’s control requests and turns them into movement primitives that the ROV needs to autonomously execute in the real environment – independently of communication latencies.
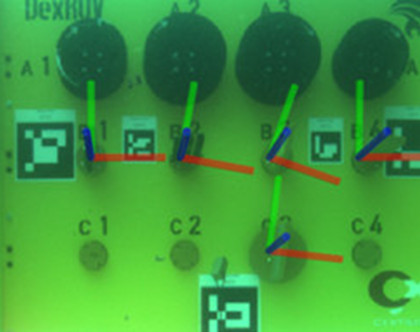
Constructor Robotics was responsible for the machine perception aspects within the project. We developed among others a multi-baseline stereo-vision system suited for deep-sea operations. This included the hardware in form of two to three cameras in according pressure bottles with with sapphire-glass windows plus a computation-bottle for processing on-board of the ROV. This intelligent underwater vision system is capable of tasks like object recognition and localization as well as navigation and mapping during the mission.
Publications
The following publications by Constructor Robotics have appeared in the context of the project (you can get publications marked with [Open Access] by a click on the DOI link; for other publications, click on [Preprint PDF] to get a preprint copy via ResearchGate):
[1] J. Gancet, D. Urbina, P. Letier, M. Ilzkovitz, A. Birk, M. Pfingsthorn, P. Weiss, F. Gauch, B. Chemisky, S. Calinon, G. Antonelli, G. Casalino, G. Indiveri, A. Turetta, C. Walen, and L. Guilpain, “DexROV: Enabling Effective Dexterous ROV Operations in Presence of Communication Latency,” in IEEE Oceans, Genoa, Italy, 2015. https://doi.org/10.1109/OCEANS-Genova.2015.7271691 [Preprint PDF]
[2] J. Gancet, P. Weiss, G. Antonelli, A. Birk, S. Calinon, A. Turetta, C. Walen, M. Ilzkovitz, D. Urbina, P. Letier, F. Gauch, G. Indiveri, G. Casalino, M. Pfingsthorn, A. Tanwani, and L. Guilpain, “DexROV: Dexterous Undersea Inspection and Maintenance in Presence of Communication Latencies,” in IFAC Workshop on Navigation, Guidance and Control of Underwater Vehicles (NGCUV), 2015. https://doi.org/10.1016/j.ifacol.2015.06.036 [Preprint PDF]
[3] J. Gancet, P. Weiss, G. Antonelli, M. F. Pfingsthorn, S. Calinon, A. Turetta, C. Walen, D. Urbina, S. Govindaraj, C. A. Müller, X. Martinez, T. Fromm, B. Chemisky, G. Indiveri, G. Casalino, P. A. D. Lillo, E. Simetti, D. D. Palma, A. Birk, A. Tanwani, I. Havoutis, A. Caffaz, L. Guilpain, and P. Letier, “Dexterous Undersea Interventions with Far Distance Onshore Supervision: the DexROV Project,” in 10th IFAC Conference on Control Applications in Marine Systems (CAMS), Trondheim, Norway, 2016. https://doi.org/10.1016/j.ifacol.2016.10.439 [Preprint PDF]
[4] T. Fromm, C. A. Mueller, M. Pfingsthorn, A. Birk, and P. D. Lillo, “Efficient Continuous System Integration and Validation for Deep-Sea Robotics Applications,” in IEEE Oceans, Aberdeen, UK, 2017. https://doi.org/10.1109/OCEANSE.2017.8084663 [Preprint PDF]
[5] T. Luczynski and A. Birk, “Underwater Image Haze Removal with an Underwater-ready Dark Channel Prior,” in IEEE Oceans, Anchorage, USA, 2017. [Preprint PDF]
[6] T. Luczynski, T. Fromm, S. Govindaraj, C. A. Mueller, and A. Birk, “3D Grid Map Transmission for Underwater Mapping and Visualization under Bandwidth Constraints,” in IEEE Oceans, Anchorage, USA, 2017. [Preprint PDF]
[7] T. Luczynski, M. Pfingsthorn, and A. Birk, “The Pinax-Model for Accurate and Efficient Refraction Correction of Underwater Cameras in Flat-Pane Housings,” Ocean Engineering, vol. 133, pp. 9-22, 2017. https://doi.org/10.1016/j.oceaneng.2017.01.029 [Open Access]
[8] T. Luczynski, M. Pfingsthorn, and A. Birk, “Image Rectification with the Pinax Camera Model in Underwater Stereo Systems with Verged Cameras,” in IEEE Oceans, Anchorage, USA, 2017. [Preprint PDF]
[9] A. Birk, T. Doernbach, C. A. Mueller, T. Luczynski, A. G. Chavez, D. Köhntopp, A. Kupcsik, S. Calinon, A. K. Tanwani, G. Antonelli, P. d. Lillo, E. Simetti, G. Casalino, G. Indiveri, L. Ostuni, A. Turetta, A. Caffaz, P. Weiss, T. Gobert, B. Chemisky, J. Gancet, T. Siedel, S. Govindaraj, X. Martinez, and P. Letier, “Dexterous Underwater Manipulation from Onshore Locations: Streamlining Efficiencies for Remotely Operated Underwater Vehicles,” IEEE Robotics and Automation Magazine (RAM), vol. 25, pp. 24-33, 2018. https://doi.org/10.1109/MRA.2018.2869523 [Preprint PDF]
[10] T. Doernbach, A. G. Chavez, C. A. Mueller, and A. Birk, “High-Fidelity Deep-Sea Perception Using Simulation in the Loop,” in IFAC Conference on Control Applications in Marine Systems (CAMS), 2018. https://doi.org/10.1016/j.ifacol.2018.09.465 [Preprint PDF]
[11] C. A. Mueller, T. Doernbach, A. G. Chavez, D. Köhntopp, and A. Birk, “Robust Continuous System Integration for Critical Deep-Sea Robot Operations Using Knowledge-Enabled Simulation in the Loop,” in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018. https://doi.org/10.1109/IROS.2018.8594392 [Preprint PDF]
[12] A. G. Chavez, C. A. Mueller, T. Doernbach, and A. Birk, “Underwater Navigation using Visual Markers in the Context of Intervention Missions,” International Journal of Advanced Robotic Systems (IJARS), 2019. https://doi.org/10.1177/1729881419838967 [Open Access]
[13] A. G. Chavez, Q. Xu, C. A. Mueller, S. Schwertfeger, and A. Birk, “Towards Accurate Deep-Sea Localization in Structured Environments based on Perception Quality Cues,” in Proceedings of the 18th International Conference on Autonomous Agents and MultiAgent Systems (AAMAS), Montreal QC, Canada, 2019, pp. 1988-1990. https://doi.org/10.5555/3306127.3331986 [Preprint PDF]
[14] A. G. Chavez, Q. Xu, C. A. Mueller, S. Schwertfeger, and A. Birk, “Adaptive Navigation Scheme for Optimal Deep-Sea Localization Using Multimodal Perception Cues,” in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 2019. https://doi.org/10.1109/IROS40897.2019.8967888 [Preprint PDF]
[15] T. Luczynski, P. Luczynski, LukasPehle, M. Wirsum, and A. Birk, “Model based design of a stereo vision system for intelligent deep-sea operations,” Measurement, vol. 144, pp. 298-310, 2019. https://doi.org/10.1016/j.measurement.2019.05.004 [Preprint PDF]
[16] C. A. Mueller, A. Gomez Chavez, T. Doernbach, D. Köhntopp, and A. Birk, “Continuous system integration and validation for underwater perception in offshore inspection and intervention tasks,” in Fundamental Design and Automation Technologies in Offshore Robotics, Elsevier, 2020, pp. 9-75. https://doi.org/10.1016/B978-0-12-820271-5.00007-9 [Preprint PDF]