(Link zur Deutschen Version / Link to the German Version)

Constructor Robotics, then still under the previous name of Jacobs Robotics, participated as partner in the BMBF-project Vulnerability of Transportation Structures, Warning and Evacuation in Case of Major Inland Flooding (FloodEvac) with a project on the underwater inspection of bridges with a marine robot equipped with an imaging sonar.
Bridges are critical transport infrastructures during floods. They are very important for disaster logistics and evacuations, but they are at the same time often badly affected by the flood. The state of the art for assessing potential damage is based on inspections above the waterline – resulting in high uncertainty – or in the use of divers – which involves very high risks for the divers and is only leads to informal reports. This sub-project therefore dealt with the use of a novel concept of a marine robot for the efficient and safe inspection of bridges in the context of flood disasters.
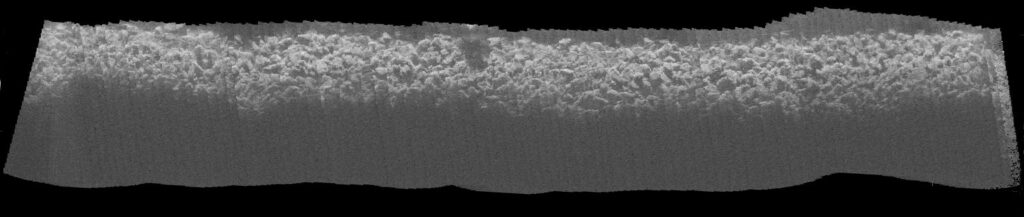
For this purpose, an integrated system consisting of a Unmanned Underwater Vehicle (UUV) with imaging sonar and a software package for control, data processing, and visualization were developed. In addition to the work on system development and integration, methods and software were developed to process the sonar data by means of signal enhancement procedures. Based on this, intelligent autonomous functions for operator assistance and methods for spatial information integration, i.e., methods. to create local maps, were successfully researched. It was shown in among others in field tests that underwater maps could be created that are suited to detect possible scouring or jams. This is even possible in extremely poor visibility conditions, which are the standard conditions in German waters, i.e., in conditions that make a visual inspection by divers or with cameras impossible.
Important results include the generation of maps with an imaging sonar using spectral registration methods, i.e., without the need for any navigation sensors like GPS or similar that tend to be imprecise near or below bridges, respectively that are unusable if the vehicle is submerged in the water. These maps can be used to detect scouring or jams.
Publications
The following publications by Constructor Robotics are related to work in the project (If you can not get access to the publication via the DOI link, click on [Preprint PDF] to get a preprint copy via ResearchGate):
[1] C. A. Mueller, T. Fromm, H. Buelow, A. Birk, M. Garsch, and N. Gebbeken, “Robotic Bridge Inspection Within Strategic Flood Evacuation Planning,” in IEEE Oceans, Aberdeen, UK, 2017. https://doi.org/10.1109/OCEANSE.2017.8084668 [Preprint PDF]
[2] M. Benndorf, T. Haenselmann, M. Garsch, N. Gebbeken, C. A. Mueller, T. Fromm, T. Luczynski, and A. Birk, “Robotic bridge statics assessment within strategic flood evacuation planning using low-cost sensors,” in IEEE International Symposium on Safety, Security and Rescue Robotics (SSRR), 2017. https://doi.org/10.1109/SSRR.2017.8088133 [Preprint PDF]